
Phát triển robot có thể điều hướng hiệu quả trên vỉa hè trong môi trường đô thị

Để những robot giao thông và hệ thống tự hành tuần tra hoạt động hiệu quả trong môi trường đô thị, đòi hỏi nó phải được di chuyển an toàn trên vỉa hề mà không va chạm với người đi bộ và các chướng ngại vật khác. Các nhà nghiên cứu tại Viện Công nghệ Georgia và Đại học Stanford gần đây đã phát triển AlienGo – một robot bốn chân có thể đi trên các tuyến đường cụ thể theo bản đồ đã định vị sẵn ở trên vỉa hè và tránh va chạm với chướng ngại vật hoặc con người.
Robot này dựa trên một khung mới, có hiệu suất cao để điều hướng trên vỉa hè an toàn. Theo ông Sehoon Ha – một trong những nhà nghiên cứu: “Chúng tôi phát triển robot lấy cảm hứng từ chiếc xe lái tự hành và robot điều hướng trong nhà. Tuy nhiên, đối với vỉa hè thì môi trường có phần đông đúc do nhiều người qua lại và rất nhiều chướng ngại vật, chính vì vậy chúng tôi đã đề xuất giải pháp để giải quyết thách thức này”.
Ban đầu, nhóm nghiên cứu đã đào tạo một mạng nơ-ron nhân tạo để điều hướng vỉa hè đơn giản trong mô phỏng. Thuật toán đầu tiên, được mệnh danh là “chuyên gia”, được đào tạo bằng cách sử dụng trình mô phỏng thế giới nổi bật tốc độ cao và được cấp quyền truy cập vào cái gọi là “trạng thái đặc quyền” của mô phỏng.
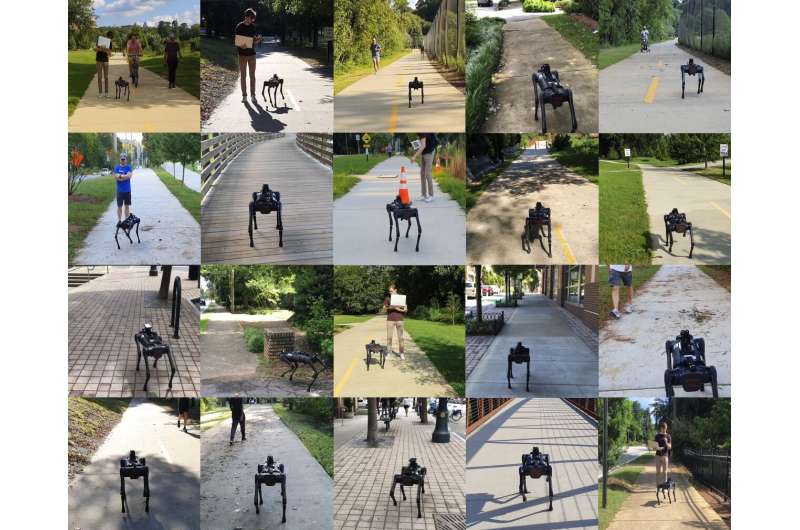
Robot tự động điều hướng các vỉa hè khác nhau ở ngoài trời trong thế giới thực.
Sau đó, mạng “chuyên gia” này đã chuyển hành vi mà nó học được sang thuật toán “sinh viên” trong một mô phỏng độ trung thực cao. Cuối cùng, mạng “sinh viên” đã tạo ra các quan sát cảm biến thực tế giống với hình ảnh vỉa hè trong thế giới thực.
Cũng theo ông Maks Sorokin – một nhà nghiên cứu khác tham gia nghiên cứu, “sinh viên” sử dụng một mạng lưới tính năng ngữ nghĩa được đào tạo tùy chỉnh để tạo ra các tính năng trừu tượng sau này được sử dụng để điều khiển robot. Cách tiếp cận này dựa trên kinh nghiệm của chúng tôi rất khó đạt được hành vi mong muốn bằng cách sử dụng đào tạo từ đầu đến cuối đơn giản vì vấn đề quá khó.”
Bằng cách sử dụng khung học tập hai giai đoạn mà họ đã phát triển có thể đạt được chính sách hiệu quả bằng cách sử dụng thông tin “đặc quyền” trong mô phỏng, sau đó chuyển các hành vi mà khung có được sang một robot bốn chân. Khi nhóm đã đánh giá khung, họ nhận thấy rằng nó hoạt động tốt hơn mô hình hiện đại khác về điều hướng trên vỉa hè. Sau đó, họ cũng thử nghiệm khung của mình trong bối cảnh thế giới thực, bằng cách áp dụng nó cho robot AlienGo khi nó điều hướng trên vỉa hè ở Atlanta.
Robot bốn chân do nhóm các nhà nghiên cứu này phát triển có thể sử dụng để hoàn thành nhiều nhiệm vụ khác nhau, chẳng hạn như giao bưu kiện hoặc giám sát môi trường đô thị. Ngoài ra, khung mà họ phát triển có thể được áp dụng cho các robot di động hiện có hoặc mới nổi khác để cải thiện khả năng di chuyển trên vỉa hè của chúng.
Hà My